ここより、本文です。
近年ロボットの活躍の場は、工場等の限定された環境から、家庭やオフィスといった人間と共存する環境へと広がっていくことが期待されています。 このような環境で使われるロボットには、自ら外界環境を認識し行動を立案するという自律性が求められます。 関西大学のロボット・マイクロシステム研究室は、このような未来を見据え、人間と共存できるロボットの研究を行っています。 アイ・アームが搭載されているホームロボットは、物体認識や軌道計画といった、人間共存型ロボットの重要な要素となる研究に使用されています。
人間共存型のロボットに関する研究を行うため、周囲に人がいる、通路が狭い、机や椅子が置かれている、といった環境で作業できるホームロボットを作る必要がありました。福祉用として開発され、そのような環境での作業に適していることが、アイ・アームを導入する決め手となりました。
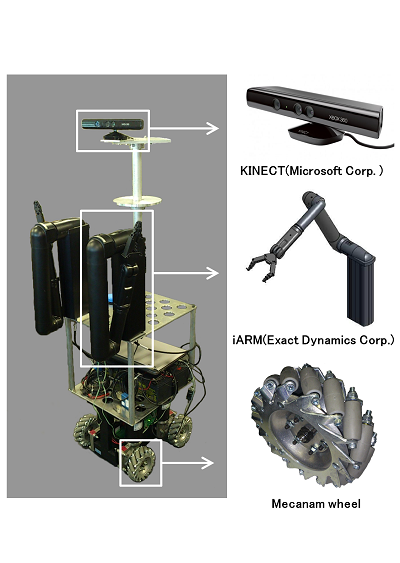
研究で使用するホームロボットは、次の要素から構成されています。
ロボット・マイクロシステム研究室では、このホームロボットを用いて、これまで次のような研究を行ってきています。(一部)
人間がモノを認識する際に、一番重要な手がかりとしているであろう特徴をもとに、RGB-Dセンサーによって取得した点群情報を用いて物体認識を行う。例えば「椅子」には「座面」と「背もたれ」があり、「座面」は人間が座るために、ある高さに拘束されているという特徴がある。こうした特徴を画像処理によって抽出し、ロボットに椅子であることを認識させる。
ホームロボットは、離れた場所に存在する目的物に対し、円弧と直線を用いた経路によって接近する。このとき、円弧区間と直線区間の継ぎ目の部分で曲率が急激に変わるため、ホームロボットが揺れて計画した軌道から外れてしまうことがある。そこで、クロソイド曲線を用いて曲率を緩和し、計画から外れにくい軌道を計算する。
Kinectで机上のペットボトルの座標を取得し、アイ・アームによって把持する。ハンド先端がペットボトルに接触しないよう、手先にカラーマークを取り付け、Kinectを用いた画像処理を行い、微小誤差を補正する。
2012年12月にアイ・アームを導入してから、ホームロボットを用いた研究テーマは先輩から後輩へ代々受け継がれてきました。そして2014年6月に2台目のアイ・アームを導入し、双腕のホームロボットの開発を進めています。いまロボット・マイクロシステム研究室は、これまで確立してきた研究要素を統合・発展させ、ロボカップ@ホームへの出場を目指しています。9月には研究室に3年生が加わり、研究メンバーの増員により開発がさらに加速していくことが期待されます。
近年注目を浴びている人間共存型ロボットですが、産業として成立させるためには、若い技術者たちの参入が必要です。 ロボカップ@ホームへの出場、そしてその先にある未来にアイ・アームが少しでも役立てるよう、テクノツールもサポートして参ります。
※ KinectはMicrosoft Corporationの商標です。
生命体工学研究科の学生たちが開発したサービス・ロボット『EXI@』にアイ・アームが搭載されました。
動画は、対面する人の腕と同じ動きをするデモです。

 ロボット・マイクロシステム研究室
ロボット・マイクロシステム研究室